|
|
| Line 1: |
Line 1: |
| − | level1_STOPSIGNAL_model1 <br/> | + | [[File:level1_STOPSIGNAL_model1.png]] |
| − | | + | |
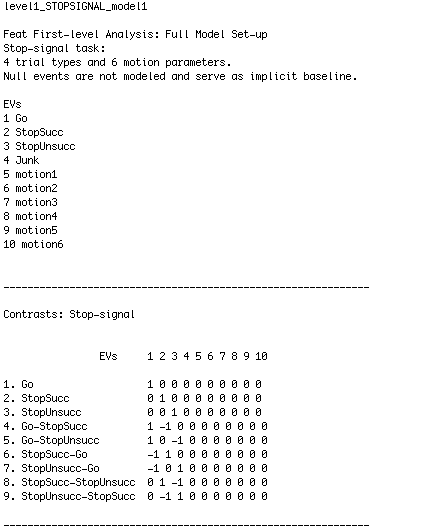
| − | Feat First-level Analysis: Full Model Set-up <br/>
| + | |
| − | Stop-signal task: <br/>
| + | |
| − | 4 trial types and 6 motion parameters. <br/>
| + | |
| − | Null events are not modeled and serve as implicit baseline. <br/>
| + | |
| − | | + | |
| − | EVs <br/>
| + | |
| − | 1 Go <br/>
| + | |
| − | 2 StopSucc <br/>
| + | |
| − | 3 StopUnsucc <br/>
| + | |
| − | 4 Junk <br/>
| + | |
| − | 5 motion1 <br/>
| + | |
| − | 6 motion2 <br/>
| + | |
| − | 7 motion3 <br/>
| + | |
| − | 8 motion4 <br/>
| + | |
| − | 9 motion5 <br/>
| + | |
| − | 10 motion6<br/>
| + | |
| − | | + | |
| − | ----
| + | |
| − | | + | |
| − | Contrasts: Stop-signal <br/>
| + | |
| − | | + | |
| − | EVs 1 2 3 4 5 6 7 8 9 10 <br/>
| + | |
| − | | + | |
| − | 1. Go 1 0 0 0 0 0 0 0 0 0 <br/>
| + | |
| − | 2. StopSucc 0 1 0 0 0 0 0 0 0 0 <br/>
| + | |
| − | 3. StopUnsucc 0 0 1 0 0 0 0 0 0 0 <br/>
| + | |
| − | 4. Go-StopSucc 1 -1 0 0 0 0 0 0 0 0 <br/>
| + | |
| − | 5. Go-StopUnsucc 1 0 -1 0 0 0 0 0 0 0 <br/>
| + | |
| − | 6. StopSucc-Go -1 1 0 0 0 0 0 0 0 0 <br/>
| + | |
| − | 7. StopUnsucc-Go -1 0 1 0 0 0 0 0 0 0 <br/>
| + | |
| − | 8. StopSucc-StopUnsucc 0 1 -1 0 0 0 0 0 0 0 <br/>
| + | |
| − | 9. StopUnsucc-StopSucc 0 -1 1 0 0 0 0 0 0 0 <br/>
| + | |
| − | | + | |
| − | | + | |
| − | ----
| + | |
| | | | |
| | Link back to [[LA5C]] page. <br/> | | Link back to [[LA5C]] page. <br/> |
| | Link back to [[HTAC]] page. | | Link back to [[HTAC]] page. |
Revision as of 15:06, 1 May 2012
Link back to LA5C page.
Link back to HTAC page.
